
ロボットカーで必須となる素材の一つは押しボタンである。
Arduinoではピンのモードを指定して用いるが、
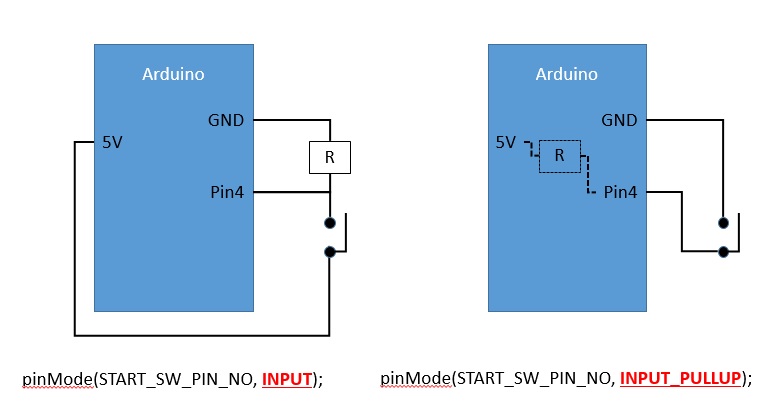
多くの資料ではデジタル入力としてINPUTというモードを使用している。
しかし、目的がスイッチの入力を見るだけのケースが多いので、
その場合は、INPUT_PULLUPのモードで省配線できる場合がある。
この事例の場合は、以下の挙動となる。
スイッチ オフの場合:start_sw=1
スイッチ オンの場合:start_sw=0
—-スケッチの例
const int START_SW_PIN_NO = 4;
void setup() {
//***** set serial port speed (bps)
Serial.begin(115200);
//***** set pin mode
pinMode(START_SW_PIN_NO, INPUT_PULLUP); // Enable pullup for input mode.
}
void loop() {
int start_sw;
start_sw=digitalRead(START_SW_PIN_NO);
Serial.print("Start Switch =");
Serial.println(start_sw);
}