スピードコントローラに与える値はどうすればよいか?
具体的には、
servo[1].write(Motor_Val);
のMotor_Valの値である。 各々実験してもらうことを前提に、このモータとスピードコントローラのケースを記載しておく。
69以下 最高速
70-92 スピードが段階的に変化(70側が高速、90側が低速)
93-174 停止
175 以上 最高速 ←正しく制御できていない

GPSロボットカーの作り方 (QZSS)
スピードコントローラに与える値はどうすればよいか?
具体的には、
servo[1].write(Motor_Val);
のMotor_Valの値である。 各々実験してもらうことを前提に、このモータとスピードコントローラのケースを記載しておく。
69以下 最高速
70-92 スピードが段階的に変化(70側が高速、90側が低速)
93-174 停止
175 以上 最高速 ←正しく制御できていない
ラジコンカーに用いる電気部品はそんなに多くはない。
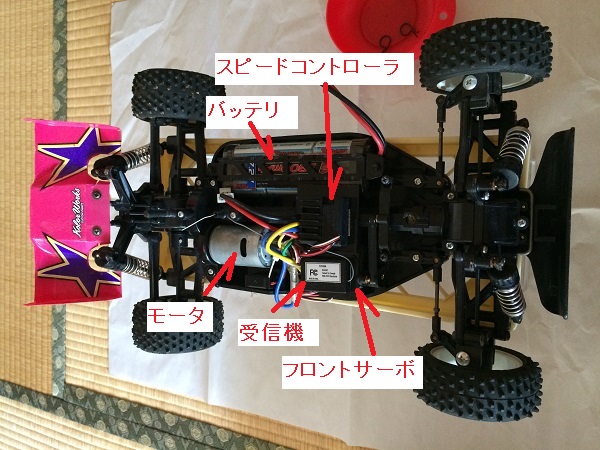
これは、ラジコンカーをキットで買ったときに標準的についていた部品をつけた状態である。 これはモータがついているキットだったために、付属していないサーボ、スピードコントローラ、受信機などは別途準備する必要がある。
モータとスピードコントローラ、受信機と送信機は組み合わせがあるので注意して選定する必要がある。
ロボットカーを作成する上では、受信機の代わりを何かしらの制御システムが担うことになる。ラジコンとして用いないのであれば、送受信機を準備する必要はない。 もちろん、フライトコントローラでラジコンでも制御したいときには必要である。
GPS・QZSSロボットカーを作るうえで、車体の選択がある。
大きく分けると自作か市販品の流用に分かれるが、経験がないのであれば、市販品を流用するケースが多い。
ここでは、ラジオコントロール カーを用いた事例を紹介する。
ここで紹介するのは2010年位に購入したマシンである。
実際に大会に出賞させたマシンではないのだが、ここでは写真モデルに活躍してもらう。

大会は芝生の上で開催されるので、多少の走破性が求められる。
2WD:後輪駆動、4WD:全輪駆動があるが、これまで出場させてもらった限りでは、2WD/4WDどちらでも大きな問題ななさそうである。もちろん4WDのほうが走破性は高いのだが、その分価格も高く、構造が少し複雑になる。
半完成品も売っているが、構造や仕組みを覚えるためにもキットを薦めたい。