********************************番外1***** 番外としてこのLoRa GatewayのSpecの一部は下記であり、さらに初感を付しておく。 *168 dB maximum link budget. Link Budjetは損失と通信距離の関係である、この数値でシミュレータにかけると 理論上の到達距離を算出できるのだが、値の指標がわからない。 LPWANは長距離とうたっている関係上良い数値なのでは?
*Programmable bit rate up to 300 kbps. LPWAは遅いというイメージがあったので、この数値であれば結構使える。 実力を測りたいところだが、プロトコル上簡単に実測するのは難しそう。
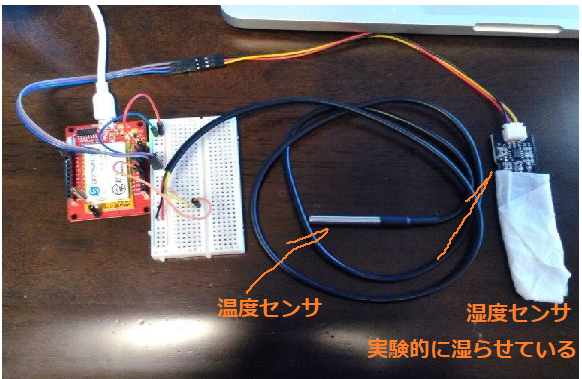
*High sensitivity: down to -148 dBm. さすがLPWAN用ともいうべきか、GPS受信機並みの受信感度といったところか
*FSK, GFSK, MSK, GMSK, LoRaTM and OOK modulation. こんなにたくさんの変調方式をサポートしている? これが普通?
*127 dB Dynamic Range RSSI. 受信感度が高いためかダイナミックレンジも大きい。
*Packet engine up to 256 bytes with CRC LoRa WAN使用をフルサポートとみてよいと信じる。
*Built-in temperature sensor and low battery indicator. LEDが見つけられない。。。。
This website stores cookies on your computer. These cookies are used to provide a more personalized experience and to track your whereabouts around our website in compliance with the European General Data Protection Regulation. If you decide to to opt-out of any future tracking, a cookie will be setup in your browser to remember this choice for one year.